QQ
QQ
1. 创建一个宏程序,并教该程序编程。
2. 记录作为宏指令创建的宏程序,并分配用于调用宏指令的引导设备。
3.执行宏命令。宏指令设置宏指令时使用宏指令、宏程序、宏指令名称、宏指令启动设备分配三个概念要明确,以下详细说明。宏程序是通过宏指令启动的程序。宏程序的教学和执行方式与普通程序相同,但作为宏程序有一些限制:一个机器人程序被记录为宏程序后,它的子类型被改变为宏。取消记录时,返回原始子类型。宏屏幕上记录的是宏程序,不能直接删除,删除前需要先删除记录。不伴随机器人动作(动作组)的宏应该在不包含动作组的程序中创建。不包含机器人运动(动作组)的宏程序可以正常启动和运行,即使机器人没有处于允许的动作状态(例如警报)。宏指令名用于调用程序中的宏程序。宏指令名支持36个字符,可以是英文字母或数字的组合。宏指令启动设备分配宏指令启动设备分配用来确定哪个机器人设备可以用来启动和执行宏指令。宏指令启动装置包括机器人教师手动操作画面、机器人教师用户按钮、机器人I/O信号等。
在使用宏指令之前,首先需要像创建普通程序一样创建宏程序。对于没有机器人运动的程序,需要在程序细节屏幕的组掩码中屏蔽机器人运动组。
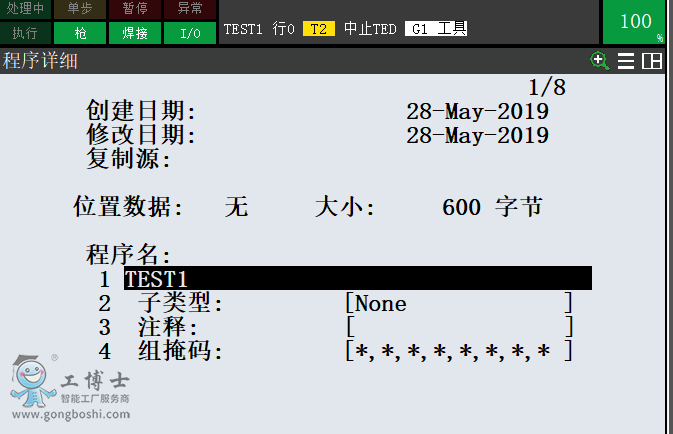
创建宏程序进行教学编程,如下所示是机器人焊接夹具的控制夹紧和松开演示程序。

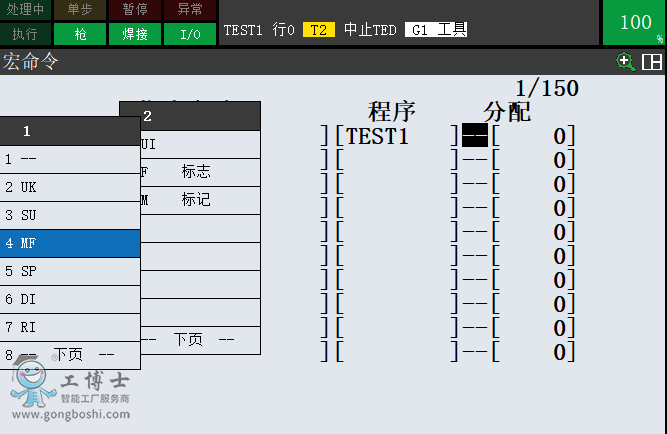
编写好宏程序后,在机器人教师操作面板上按下菜单键,在弹出的菜单中选择“6设置”→“2设置”→“3宏”。

将光标移动到宏命令界面的“指令名称”栏,在指导教师操作面板上按ENTER键,输入需要设置的宏指令名称,如Macro1。

将光标移动到宏命令的Programs列,然后按selec below从弹出的机器人程序列表中选择创建的宏程序,比如TEST1。

将光标移动到宏指令“分配”栏的“——”,然后按下面的“选择”键,在弹出的机器人启动设备列表中,根据需要选择宏指令启动设备。在这种情况下选择MF,即在机器人指导员的手动操作屏幕上启动宏指令。