

 QQ
QQ
震惊!发那科工业机器人自带视觉教程解析
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
主要步骤如下:
查询机器人控制柜的IP地址,如果本身没有地址则需要给它设置一个IP地址。
设置本机电脑IP地址,将电脑的IP地址设置为跟机器人同一网段的地址即可。
通过电脑IE浏览器访问机器人的IP,进入登陆界面
安装FANUC视觉系统的插件
电脑如果是**次进入这个视觉系统,则需要安装插件才能显示出视觉的信息,点击“”进入界面后,系统会提示需要下载插件。将插件下载安装后,重新进入界面
界面如下:
查询机器人控制柜的IP地址,如果本身没有地址则需要给它设置一个IP地址。
设置本机电脑IP地址,将电脑的IP地址设置为跟机器人同一网段的地址即可。
通过电脑IE浏览器访问机器人的IP,进入登陆界面
安装FANUC视觉系统的插件
电脑如果是**次进入这个视觉系统,则需要安装插件才能显示出视觉的信息,点击“”进入界面后,系统会提示需要下载插件。将插件下载安装后,重新进入界面
界面如下:

(示教器设置为中文时,界面也为中文。注:配置模板时应设置为英文,不然相机等一些参数会为乱码,影响配置)
点击进去后出现如下界面,进入视觉系统的设置,主要对以下三部分的功能进行配置
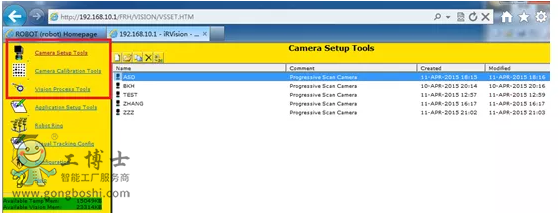
新建——进入**部分(相机)的设置
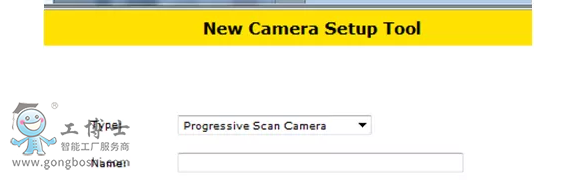
相机类型视情况而定,现在用的为以上型号。
主界面如下:(右边一栏为相机的设置参数)

相机设置的话主要第四项(曝光时间)的设置,具体为当时环境所定。之后直接保存就可以了。
一、进入第二部分(校准)
主界面如下:
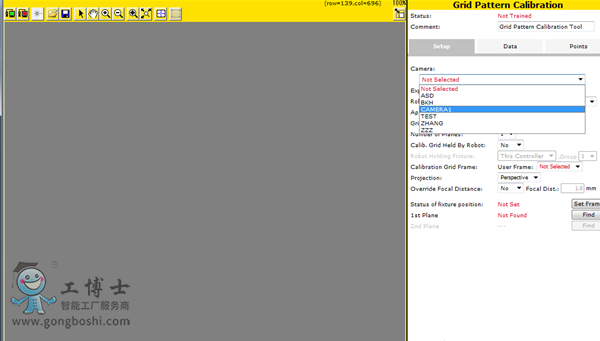
选择你在**部分所创建的相机
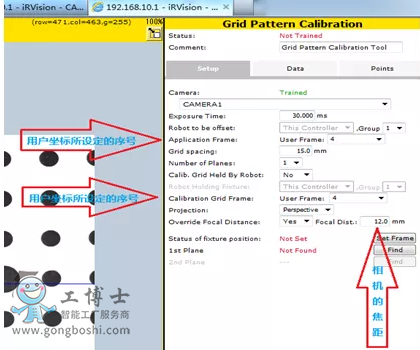
其余为默认选项,需要设定的视实际情况而定。
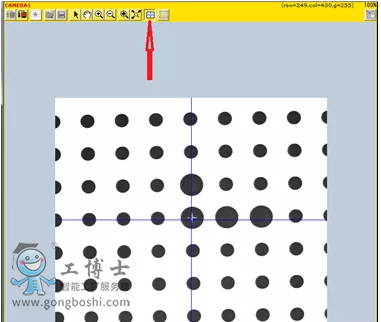
Grid spacing:所校准用户坐标时所用纸张上点与点之间的距离
Number of Planes:选1——指相机



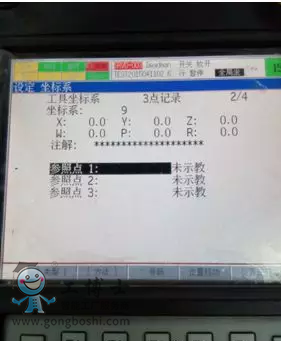
校正时需要对三个点进行校正,每一个点改变一次机器手的形态,不过点都要在你校正物体的正上方,如下图。

上图为设置工具坐标,设置用户坐标也为相同的道理
注:在校准用户坐标的时候,纸张的中心要在十字架的中点上,该点为坐标的原点,设置完原点后,再以原点为中心,对x轴与y轴的点进行示教。
(提示:工具坐标与用户坐标的校正一般只需校正一次就可以,之后可以一直使用,不用重复的校正)
工具坐标与用户坐标校准完之后按
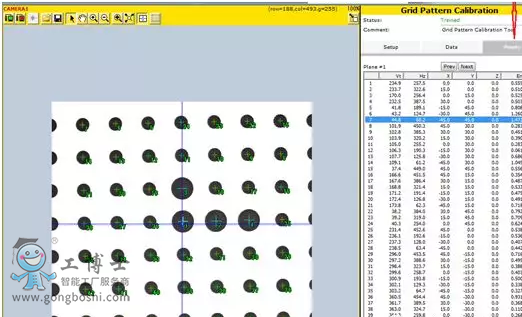
导入坐标

再点击Points查看所示教坐标的误差,在err列中数值越小,说明所校准的坐标越**(平时示范中把大于1的数Delete掉就可以)
再保存数据退出。
进入第三部分(模板匹配)
新建模板—>进入主界面—>选择你所创建的校准坐标

选择坐标后点击GPM进入界面

点击Teach Pattern进入选择模板(在镜头拍摄的范围下放一个物体匹配)
Set origin:选择要对准的坐标(确定好模板后一般为所匹配区域的中心点)
以下工具都为模板参数的设定(做为示范的话一般默认就可以)

模板匹配选择好后进入上一层
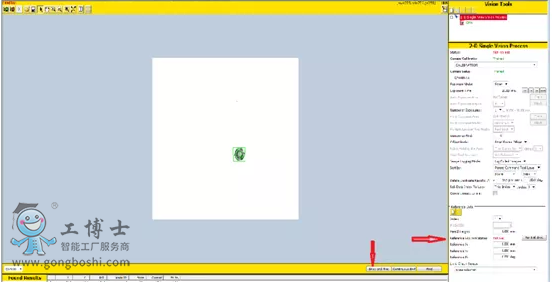
点击Snap andFind—>Set Ref. Pos.导入模板再保存就都设置完成了。
在示教器编写程序.
可以参考以下格式

**句与下面的第八句对应,形成一个循环。
第二句你自己为机器的起始坐标。
第三与第四句设定你所做的模板
第五句记录你所要到的参考点,500mm/sec为速度,VOFFSET,VR[1]为偏移值
第六句与**句相同
